Normal_Equation_Proof_2_Matrix_Method
# 首先补充一点矩阵的知识:求导、迹的性质
矩阵的求导和矩阵的迹是密不可分的
# 矩阵的求导
# 矩阵的迹
# 证明中需要的一些其他性质
结合矩阵的求导, 还有以下性质:
- $$\nabla_{A} \operatorname{tr} A B =B^{T}$$
- 结合 这里对$\operatorname{tr} A B$的推导, 可以看出对于矩阵$A$每一个位置单独求偏导, 都会得到$b_{ji}$, 即$B^T$对应的位置.
- 或者可以从导数的角度来证明:
标量函数$f=\operatorname{tr}AB$
$$\begin{align}
df &= d\space \operatorname{tr}AB \\ &= \operatorname{tr}d(AB) \\ &= \operatorname{tr}BdA \\ \end{align}$$ 联系:所以: $$\frac{\partial f}{\partial A}=B^T$$ 证毕
- $$\nabla_{A^{T}} f(A) =\left(\nabla_{A} f(A)\right)^{T}$$
$$\begin{align} \nabla_{A^T} f(A) &=\left[\begin{array}{ccc} \frac{\partial f}{\partial A^T_{11}} & \cdots & \frac{\partial f}{\partial A^T_{1 n}} \\ \vdots & \ddots & \vdots \\ \frac{\partial f}{\partial A^T_{m 1}} & \cdots & \frac{\partial f}{\partial A^T_{m n}} \end{array}\right]\\ &=\left[\begin{array}{ccc} \frac{\partial f}{\partial A_{11}} & \cdots & \frac{\partial f}{\partial A_{1 n}} \\ \vdots & \ddots & \vdots \\ \frac{\partial f}{\partial A_{m 1}} & \cdots & \frac{\partial f}{\partial A_{m n}} \end{array}\right]^T\\ &=\left(\nabla_{A} f(A)\right)^{T} \end{align}$$
$$\nabla_{A} \operatorname{tr} A B A^{T} C =C A B+C^{T} A B^{T} $$ 证明: 标量函数$f=\operatorname{tr} A B A^{T} C$ $$\begin{align}
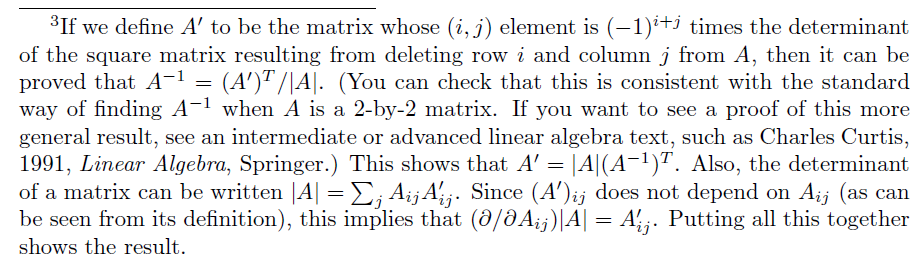
df &= d\space \operatorname{tr} (A B A^{T} C) \\ &= \operatorname{tr}(d(A B A^{T} C)) \\ &= \operatorname{tr}(dA (B A^{T} C)+A dB (A^{T} C)+(A B) dA^{T} (C)+(A B A^{T}) dC) \\ &= \operatorname{tr}(dA (B A^{T} C)+(A B) dA^{T} (C)) \\ &= \operatorname{tr}((B A^{T} C)dA)+\operatorname{tr}( (CA B) dA^{T})) \\ &= \operatorname{tr}((B A^{T} C)dA)+\operatorname{tr}( (CAB)^T (dA^{T})^T)) \\ &= \operatorname{tr}((B A^{T} C)dA)+\operatorname{tr}( (CAB)^T dA) \\ &= \operatorname{tr}\left(\left(BA^{T}C+ (CAB)^T\right) dA\right) \end{align}$$ 所以: $$\frac{\partial f}{\partial A}=\left(BA^{T}C+ (CAB)^T\right)^T=C A B+C^{T} A B^{T}$$ 证毕$$\nabla_{A}|A| =|A|\left(A^{-1}\right)^{T}$$ 参见吴恩达讲义里面的证明:
# 然后是证明
内积的另一种表述: $z^{T} z=\sum_{i} z_{i}^{2}$ : $$ \begin{aligned} \frac{1}{2}(X \theta-\vec{y})^{T}(X \theta-\vec{y}) &=\frac{1}{2} \sum_{i=1}^{m}\left(h_{\theta}\left(x^{(i)}\right)-y^{(i)}\right)^{2} \\ &=J(\theta) \end{aligned} $$ 为了最小化 $J$, 我们对 $\theta$求导. 结合上面的补充性质, 我们有: $$ \nabla_{A^{T} } \operatorname{tr} A B A^{T} C=B^{T} A^{T} C^{T}+B A^{T} C $$ 这个在下面会用到. 求导有: $$\begin{aligned} \nabla_{\theta} J(\theta) &=\nabla_{\theta} \frac{1}{2}(X \theta-\vec{y})^{T}(X \theta-\vec{y}) \\ \text{(展开)}&=\frac{1}{2} \nabla_{\theta}\left(\theta^{T} X^{T} X \theta-\theta^{T} X^{T} \vec{y}-\vec{y}^{T} X \theta+\vec{y}^{T} \vec{y}\right) \\ \text{(标量的迹就是它自己)}&=\frac{1}{2} \nabla_{\theta} \operatorname{tr}\left(\theta^{T} X^{T} X \theta-\theta^{T} X^{T} \vec{y}-\vec{y}^{T} X \theta+\vec{y}^{T} \vec{y}\right) \\ &=\frac{1}{2} \nabla_{\theta}\left(\operatorname{tr} \theta^{T} X^{T} X \theta-2 \operatorname{tr} \vec{y}^{T} X \theta\right) \\ \text{(利用上面的推论)}&=\frac{1}{2}\left(X^{T} X \theta+X^{T} X \theta-2 X^{T} \vec{y}\right) \\ &=X^{T} X \theta-X^{T} \vec{y} \end{aligned}$$
零导数为零, 有$X^{T} X \theta=X^{T} \vec{y}$ , 所以 $\theta=(X^{T} X )^{-1}X^{T} \vec{y}$ 证毕.